Pid Control Valve Adjustment
How To Fix Process Control Loop Problems That Pid Tuning Cannot Correct

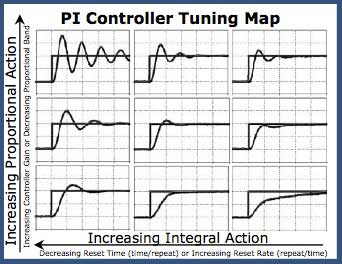
What Are Pid Tuning Parameters Realpars
Pid Controllers Explained Control Notes
Pid Tuning In Distributed Control Systems Yokogawa Electric Corporation

Control Engineering Tuning Pid Loops For Level Control

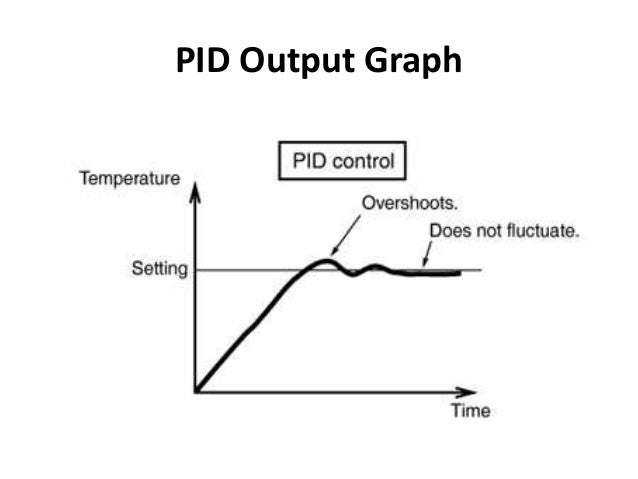
Basics Of Pid Control Proportional Integral Derivative Industrial Controls

For example a tank level pid loop might have an op in k h flow rather than to a valve.
Pid control valve adjustment.
Pid Controller Working And Tuning Methods

Pid Control Loops Implementation Industrial Automation Industrial Automation Plc Programming Scada Pid Control System
Build A Pid Controller With Python 2019 Onion

Principles Of Pid Control And Tuning Eurotherm By Schneider Electric
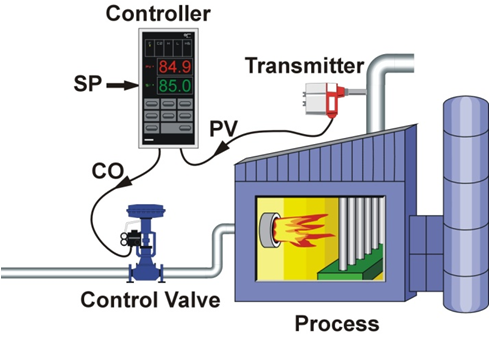
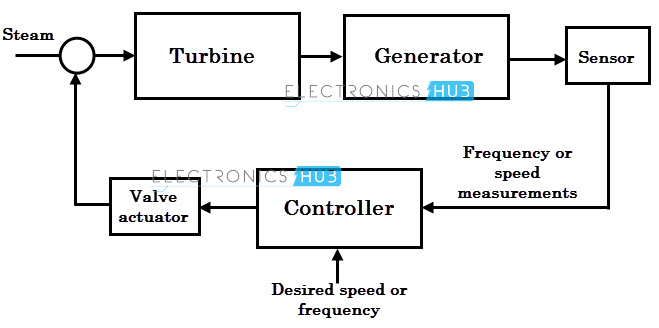
What Is Pid Control
How To Avoid Common Tuning Mistakes With Pid Controllers
Pid Controller Action Directing Acting Reverse Acting

Pid Control Hydraulic Test Rigs Khurram Waris Easybodge
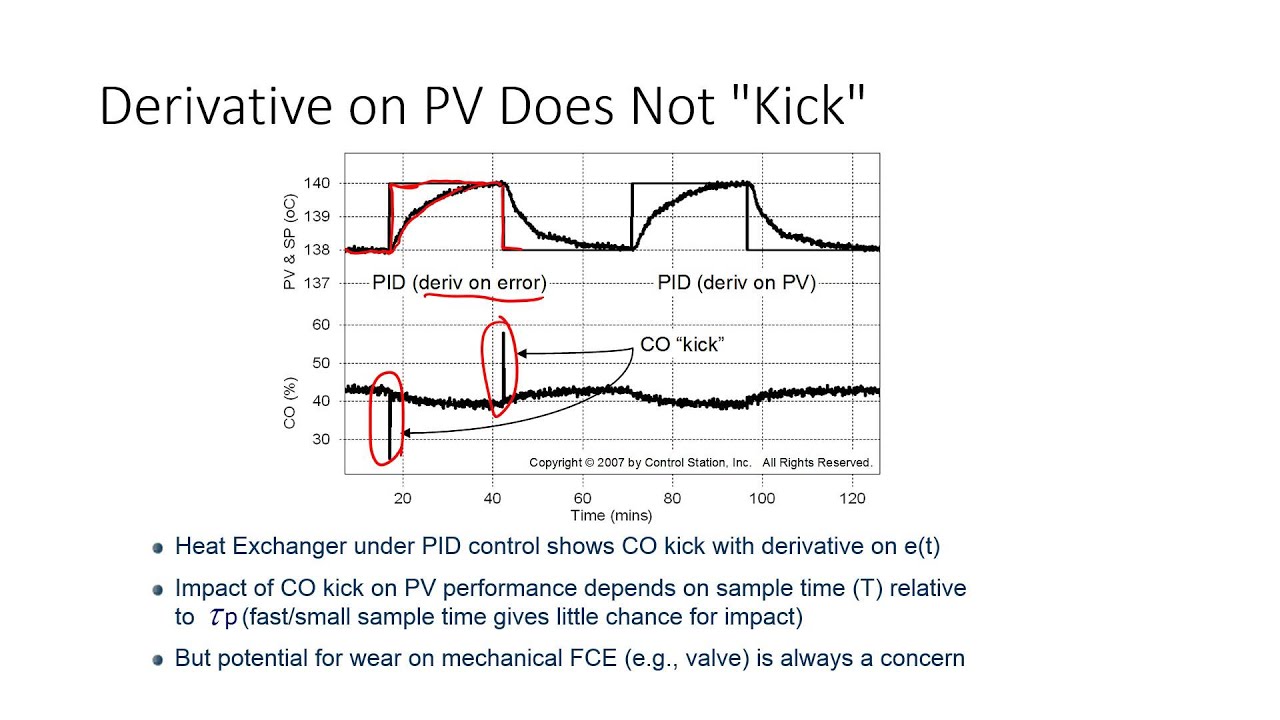
Pid Control Derivative Action Youtube

The Basics Of Tuning Pid Loops Crossco

How To Program A Basic Pid Loop In Controllogix Realpars

The Pneumatic Pid Controller S Working Principle Visaya
Pid Control Technical Notes Instrumentation Central

Basic Control Theory Spirax Sarco

Pneumatic Pid Controllers Closed Loop Control Systems Automation Textbook
Week 14 Pid May 24 2016 Pe 3032
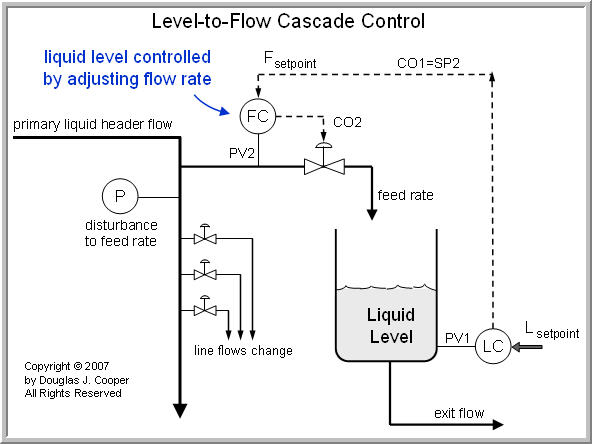
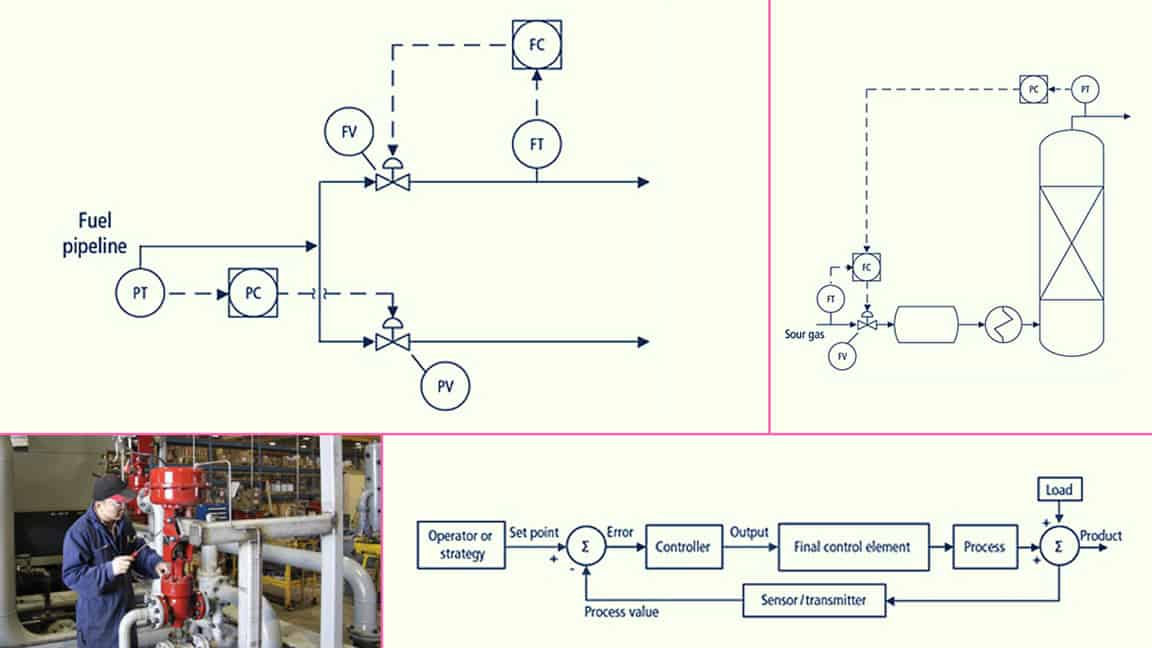
The Cascade Control Architecture Control Guru

Adjusting The Pid On An Epr 3000 Electronic Pressure Regulator Youtube
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcs4pdkk9mrfjtu L70vb38b9ubh2ks U 4erh0j5b7a6hideuvq Usqp Cau
5 Exercises 139 8 11 Consider The Simulation Resul Chegg Com

Introduction To Pid Control Dataforth

Installation And Commissioning Of Controls Spirax Sarco

Pid Control Schematic Diagram For Servo Cylinder Closed Loop Control System Download Scientific Diagram

Arduino Pid Control Tutorial Make Your Project Smarter
Source : pinterest.com
